零差云控
零误差的运动控制系统 云端控制的工业互联网
产品列表
获取报价
机器人关节
直筒I型系列
eRob70F
eRob70I
eRob80F
eRob80I
eRob90I
eRob110I
eRob142I
eRob170I
转角T型系列
eRob70 T型
eRob80 T型
eRob90 T型
eRob110 T型
eRob142 T型
编码器
eCoder11
eCoder18
eCoder20
eCoder35
eCoder35H
eCoder45
eCoder65
配件
认证与资质
服务与支持
资料下载
购买与联络
关于我们
企业新闻
人才招聘
诚招代理
报价与交期
快速交货与货期
快速交货与货期
库存品促销优惠
热销型号
获取报价
机器人关节
直筒I型系列
eRob70F
eRob70I
eRob80F
eRob80I
eRob90I
eRob110I
eRob142I
eRob170I
转角T型系列
eRob70T
eRob80T
eRob90T
eRob110T
eRob142T
编码器
eCoder11
eCoder18
eCoder20
eCoder35
eCoder35H
eCoder45
eCoder65
配件
应用案例
协作机器人
医疗设备
自动化设备
工业自动化机器人
仿生机器人
认证与资质
服务与支持
资料下载
资料下载
购买与联络
关于我们
企业新闻
人才招聘
诚招代理
报价与交期
快速交货与货期
快速交货与货期
库存品促销优惠
热销型号
专业
>
快速
>
高效
专业·快速·高效
零差云控
当前位置:
首页
>
企业新闻
【产品介绍】协作机器人关节,快速搭建机器人
华为天才少年稚晖君历时2个月自制同步现实机械臂,可远程做缝合手术
若使用我司模组,可在4小时内完成机器人本体搭建
01
什么是协作机器人
协作机器人也是工业机器人中的一种类型,
提到工业机器人,大多数人一定会想到这个画面
:
一直以来,工业机器人都是体型庞大、看似笨重的“大家伙”,用于完成一些专门为它们量身设计的特定任务。为了安全起见,它们往往会被“关“在笼子里,被隔离和“保护”起来。
与传统意义上的工业机器人不同,
比如这个
协作机器人的设计初衷就是可以与人类共同工作,它们体积小巧,柔性灵活度非常高,其中集成的传感器会感受到外部受力,如果这个力太大,将使机器人停止运动,相应的保护机制可以避免在工作中误伤人类。
机器人挥刀削豌豆
再如这个
仿生机器人后空翻
10只逆天狗拖动一台卡车
02
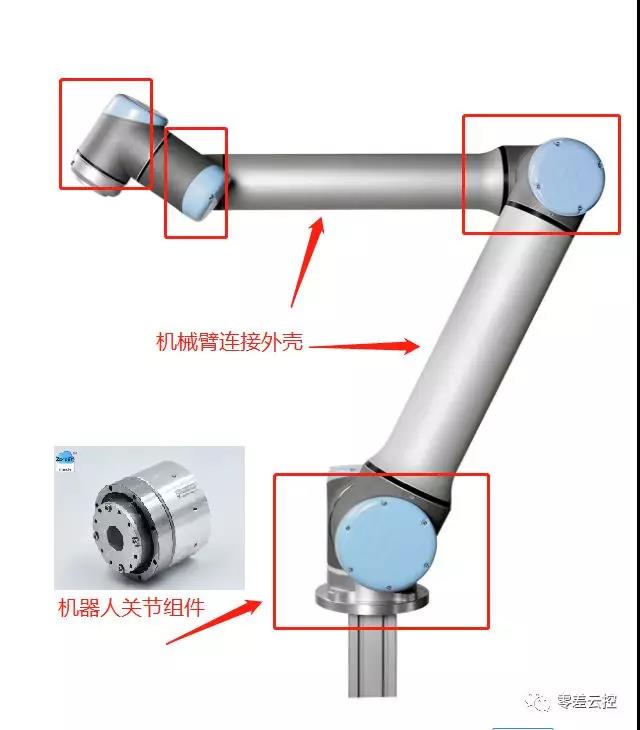
协作机器人主体的分解结构
看了以上协作机器人的应用案例,你会很好奇协作机器人的结构,它的结构和传统的机器人有什么不同呢?
其实将它们拆分,我们看到它的机械臂系统主要是由一个个机器人关节和机械臂连接外壳组合而成,来看一张清晰的大图,
其中红色框图里是最基本的关节组件单元:
另外,别忘了还有协作机器人的控制器和拖动示教器。
以上部分就组成了一台完整的协作机器人。
03
如何快速搭建一台协作机器人
了解了协作机器人的分解结构,
您如果想迅速拥有自己的协作机器人主体
,只需要机器人关节和机械臂外壳就足够了,这里就要隆重推荐一下零差云控的机器人关节。
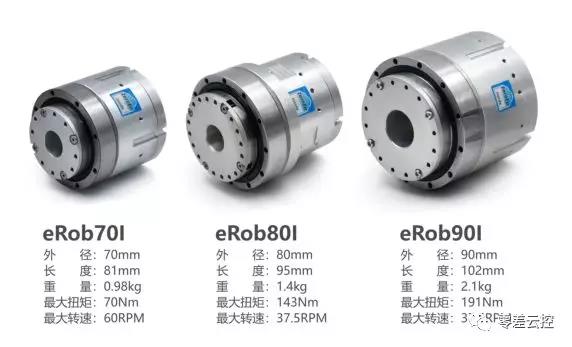
为了满足广大客户快速搭建协作机器人主体平台的需求,灵活配置负载要求,零差云控目前提供了5种机器人关节,
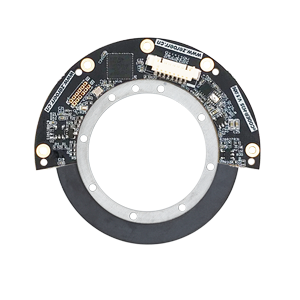
输入输出端均采用绝对式编码器,其中输出端分辨率高达
19
位,全闭环控制,确保定位精度的绝对准确,最小的关节外径70mm
,重量仅0.97kg
。
而且我们的关节支持EtherCAT和CANopen两种通信协议,可以灵活搭配多种品牌的控制器,让您随心所欲。
零差云控机器人关节
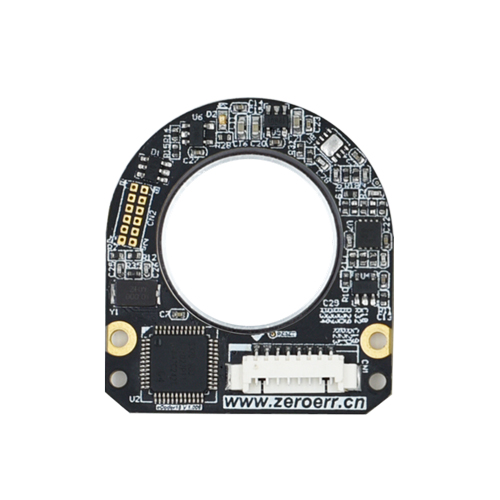
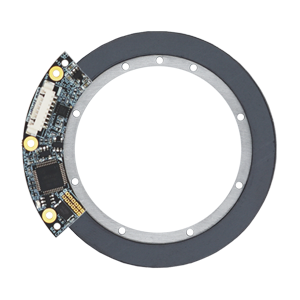
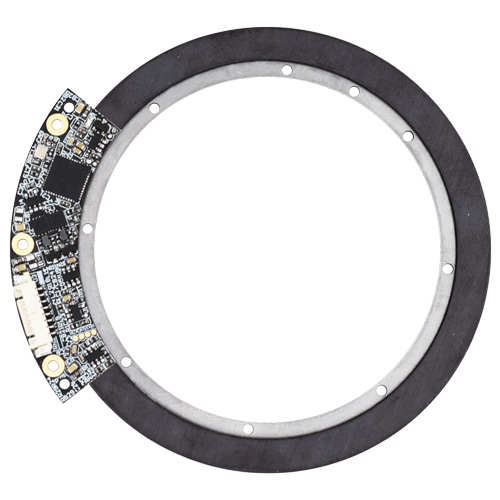
那再将关节中的结构分解呢,它都是由什么零部件构成的呢?请看下图:
零差云控机器人关节核心构成
上一篇:
我公司因扩大规模搬迁宝安区新址
下一篇:
产品升级 eRob70I V4
资讯中心
▶ 企业新闻
▶ 应用案例
▶ 常见问题
▶ 关于我们
产品中心
▶ 编码器
▶ 机器人关节
▶ 产品配件
联系我们
售前咨询:
电话:
134 8079 6208
邮箱:
sales@zeroerr.com
































 粤公网安备 44030602007887号
粤公网安备 44030602007887号