| 基础参数 |
|---|
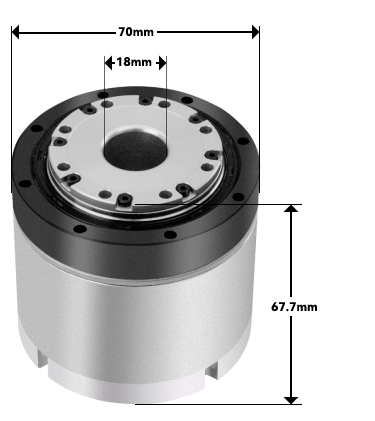
| 直径: 70mm |
| 长度: 71mm |
| 重量: 0.82kg |
| 瞬间容许最大扭矩: 70Nm |


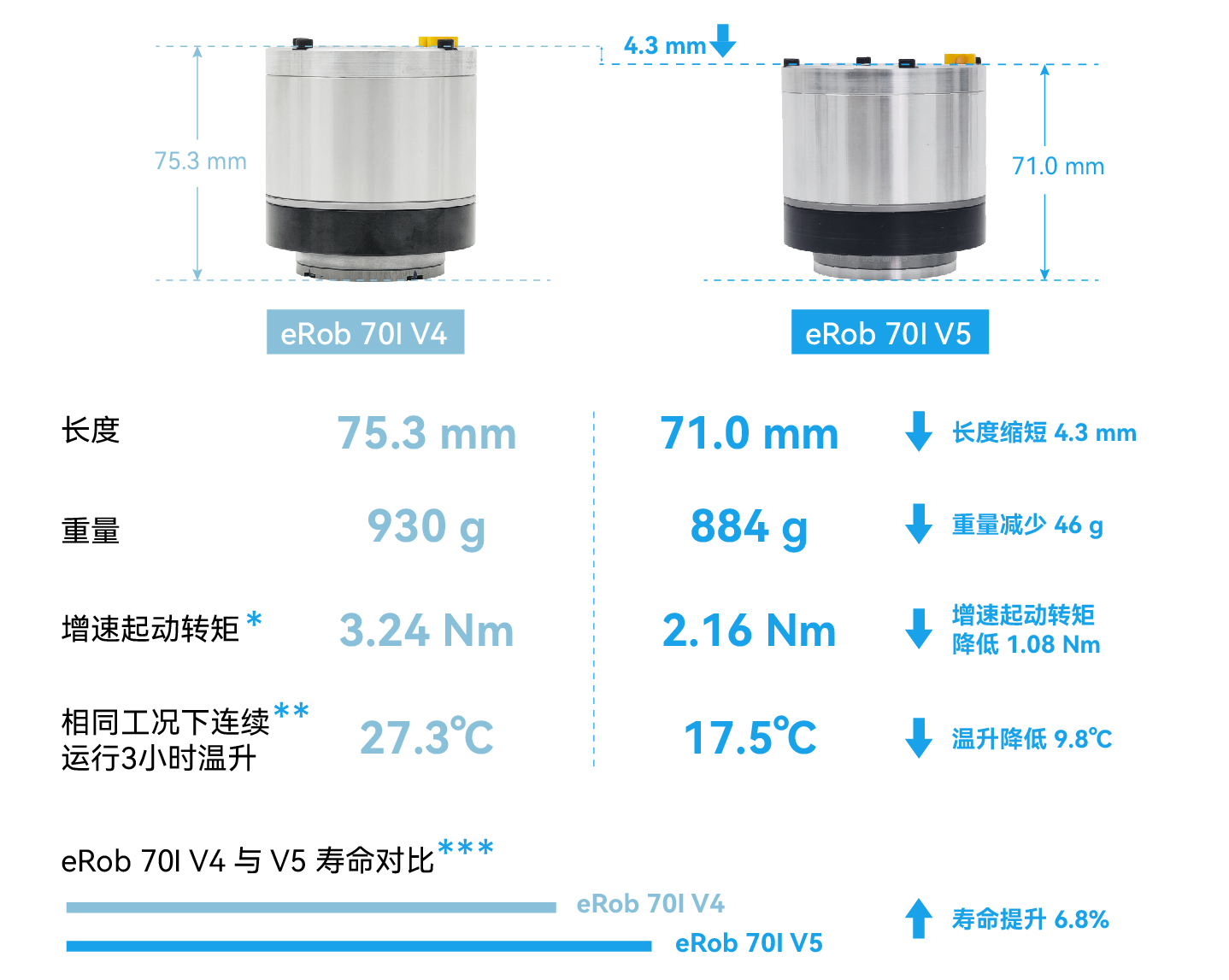
*
在空载且环境温度为30℃、输出轴转速为0时,不同模组的测量数值存在差异,此数据仅供参考。
**
对于5kg负载的协作机器人,在常规工况下,其六轴表面温度在不同模组与不同工况之间会有差异,仅供参考。
***
根据 公式,以5kg协作机器人四轴为例:
由于末端三个eRob70关节自重减少,致使第4轴负载降低,从而提升了该轴寿命,参考计算如下:
eRob 70I V5 寿命可提升6.8%
见《Harmonic Drive 组合型产品综合目录》第10页
| 版本相同点 | 安装方式 | 均为端面安装,孔位相同,可互相兼容安装接口 | |||||||||
| 内孔 | 18mm | ||||||||||
| 精度 | 重复/绝对定位精度:±7/±15角秒或±10/±25角秒* | ||||||||||
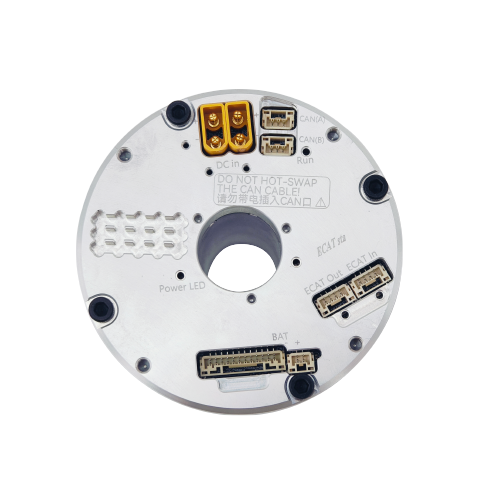
| 电气接口 | 通信方式:EtherCAT/CANopen/Modbus,输出端编码器分辨率:19/20Bit | ||||||||||
| 谐波减速机-速比 | 14-50 | 14-80 | 14-100 | 14-120 | |||||||
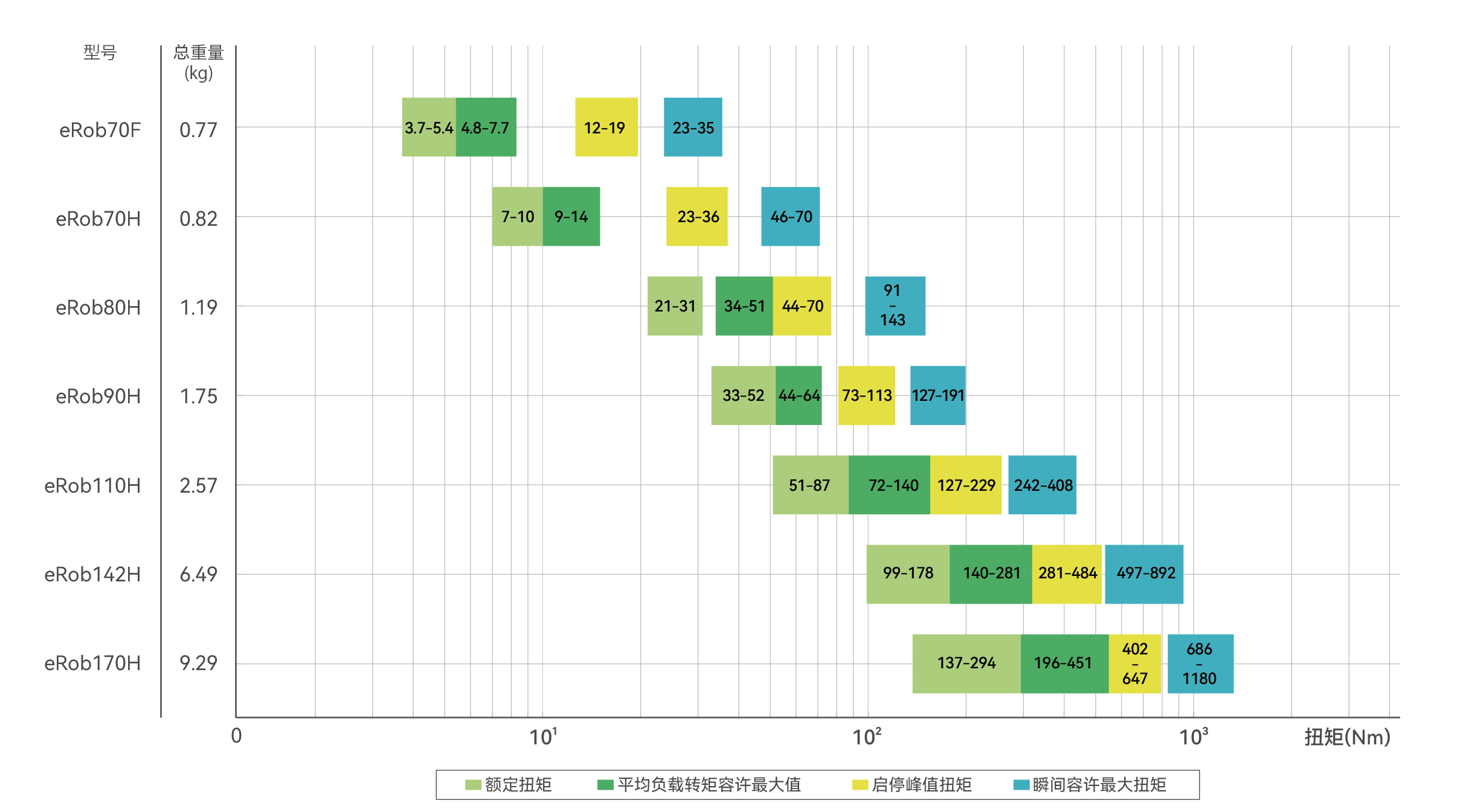
| 启停峰值扭矩(Nm) | 23 | 30 | 36 | 36 | |||||||
| 平均负载转矩容许最大值(Nm) | 9 | 14 | 14 | 14 | |||||||
| 额定扭矩(Nm) | 7 | 10 | 10 | 10 | |||||||
| 瞬间容许最大扭矩(Nm) | 46 | 61 | 70 | 70 | |||||||
| 输出端峰值转速(RPM) | 60 | 37.5 | 30 | 25 | |||||||
| 电机功率 | 100 | ||||||||||
| 供电电压 | |||||||||||
| 48V(±10%) 请务必详细阅读《为什么不能用普通的开关电源作为模组的供电?》
以及《关节模组手册》第三章eRob输入电源说明
|
|||||||||||
| 版本型号 | v4 | v5 | |||||||||
| 减速器输出端惯量(g-mm2) | 69717 | 68484 | |||||||||
| 减速器输出端质量(kg) | 0.17 | 0.166 | |||||||||
| 不含制动器版 | 减速器输入端惯量(g∙mm²) | 47767 | 22674 | ||||||||
| 减速器输入端质量(kg) | 0.18 | 0.087 | |||||||||
| 外径x长度(mm) | Φ70x75.3 | Φ70x71 | |||||||||
| 总重量(KG) | 0.87 | 0.82 | |||||||||
| 含制动器版 | 减速器输入端惯量(g∙mm²) | 50996 | 26128 | ||||||||
| 减速器输入端质量(kg) | 0.19 | 0.1 | |||||||||
| 外径x长度(mm) | Φ70x75.3 | Φ70x71 | |||||||||
| 总重量(KG) | 0.93 | 0.88 | |||||||||
| 共同参数 | 通孔直径:18mm, IP等级:IP54, 制动器类型:摩擦式阻尼制动器 | ||||||||||
| 选装配置 | 通信方式:EtherCAT/CANopen/Modbus; 输出端编码器分辨率19Bit,重复/绝对定位精度±10/±25角秒*; 输出端编码器分辨率20Bit,重复/绝对定位精度±7/±15角秒*; |
||||||||||
| 注:以上参数只保留最新参数,在不同版本产品中略有差异,具体参数详见各型号、各版本图纸 关于精度的具体说明,详见:机器人关节精度检测报告 |
|||||||||||

*
MC XX.EX.XX中的大写E代表新版后盖。
**
新旧标识后盖自然过渡更新,旧后盖库存消耗后,将统一使用新后盖。
省掉上百种机械电子器件选型、设计、采购、组装的人力和时间成本。
开放的位置环、速度环、电流环数据及PID实时调节,适合动态变负载、变惯量的机器人应用。
还有:±10V模拟量接口、脉冲方向接口、I/O接口、RS485接口、外部编码器接口、STO接口,全部都在DxL=70x67mm的空间。
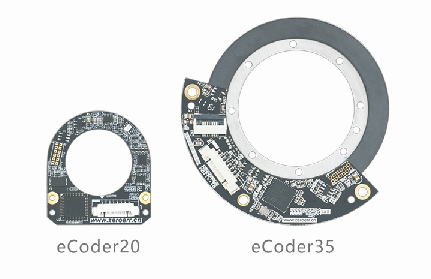
输出端20位绝对值编码器,重复定位精度高达±7角秒,绝对定位精度高达±15角秒*,可记忆单圈及多圈断电位置,全闭环控制,无磨损精度。
采用摩擦式制动保持器,停机无晃动,开机无抖动。可实现满负载零速启动。运行无磨粉,转动无噪音,耐受100%全速重载急停。
| eRob |
|
|||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 70 |
 |
|||||||||||||||
| F |
|
|||||||||||||||
| 100 |
|
|||||||||||||||
| I |
 I型关节  T型关节 |
|||||||||||||||
| B |
|
|||||||||||||||
| M |
|
|||||||||||||||
| 18 |
 |
|||||||||||||||
| E |

|
|||||||||||||||
| N |
|
|||||||||||||||
| □ |
|
|||||||||||||||
|
*关于精度具体说明,详见机器人关节精度检测报告
地 址:广东省深圳市宝安区福海街道福园一路40号
电 话:134 8079 6208


























 粤公网安备 44030602007887号
粤公网安备 44030602007887号